The Motor item provides automatic motion without keyframes for dynamic objects. Like an engine, it can provide a normal forward or reverse motion using the Linear Target Velocity, or it can be used to rotate an object using the Angular Target Velocity.
To apply a Motor automatically, users can select two items prior to invoking the Motor constraint. The first item selected represents the master or parent item and will be populated as 'Body A' within the Motor item, the second item selected will be the item that receives the motion of the motor, also considered the auxiliary or child item and will be populated as 'Body B'. With the items selected, LMB+click on the 'Motor' button, adding the item to the 'Items List'. The default center location (position) of the Motor will be exactly half-way between the Body A and Body B objects with a line drawing to the centers of the constrained items. The Motors items position represents its center of rotation to the target item, so it will be likely users will need to re-position the item once it has been applied.
Removing Motor items can be done by simply selecting the item and pressing the 'Delete' key on the keyboard. To temporarily disable the effects of the Motor, toggle the 'Enable' option.
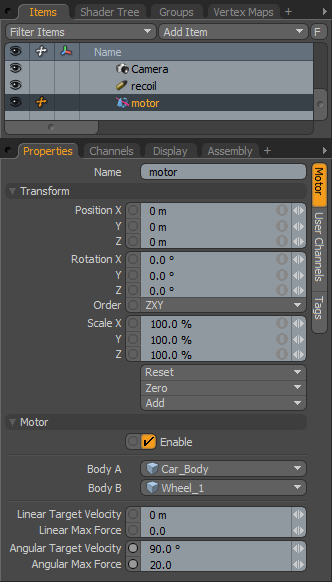 Name: This data field displays the current Motor items name. Users may easily change it by LMB-clicking within the field and typing the new name.
Name: This data field displays the current Motor items name. Users may easily change it by LMB-clicking within the field and typing the new name.
Transform--
Position X/Y/Z: The Position XYZ values represents the initial center for constraint item in 3D world space. Based on its initial position, once a dynamics simulation is invoked, the constraining item will rotate and move based on this initial (resting) position.
Rotation X/Y/Z: The Rotation XYZ value represents the initial (resting) rotation of the Motor item.
Order: The 'Order' option allows the user to set the order that rotations are applied to the item. However, since the rotations to the Motor are derived procedurally, this option is superfluous.
Scale X/Y/Z: The Scale XYZ values have no direct affect over Constraints.
Reset: Resets the selected transform values to (0,0,0) returning the item back to its default state.
Zero: Resets the chosen transform property values to '0'.
Add: The 'Add' function will add the selected set of transforms to the channel list. Useful when keyframe animating complex motions, providing a layered approach to the applied transforms. However, there are no benefits to applying additional transforms to dynamic objects.
Motor--
Enable: The 'Enable' option toggles the Motor item on or off. When enabled the Motor will effect the target item during a dynamics simulation, when disabled, the Motor item will be ignored. However, disabled Motors are persistent across modo sessions being saved with the scene, and retain their present settings.
Body A: The 'Body A' setting represents the item that is constrained to, this could also be considered the parent or master item.
Body B: The 'Body B' setting represent the item that is constrained, this could be considered the child or auxiliary item. When a Linear or Angular force is a non-zero value, this is the object that receives the motion of the motor.
Linear Target Velocity: When this value is non-zero it applies a linear motion to the 'Body B' item, positive value move the item forward and negative values move it in reverse. The direction of the motion is based on the resting position of the constraint. The motor will attempt to achieve the defined Target Velocity, taking into account forces, mass as well as any collisions it encounters.
Linear Max Force: The 'Linear Max Force' defines the strength of the motor. This can be thought of like horsepower in a way, the greater the force of the motion the more difficult it will be for opposing forces to affect the object. Such as if a car were moving up a steep grade and is affected by the pull of gravity. Users could increase the Maximum Force value allowing the car to move uphill more easily without changing its speed.
Angular Target Velocity: This setting is basically the same as 'Linear Target Velocity' but applies a rotating motion to the object instead.
Angular Max Force: This setting is basically the same as 'Linear Max Force' but applies as a rotational force to the object instead.

